
The Problem
E4D Technologies produced a handheld dental scanner that used structured light to generate real-time 3D point cloud data, processed via a SLAM algorithm to produce accurate 3D models of dental anatomy. The system performed well, and E4D’s team understood clearly what it would take to increase performance further: the SLAM implementation had accumulated years of deep, specialized development, and increasing scanner speed meant going into that codebase at the level of the mathematical algorithms themselves, understanding precisely what the code was doing and why before any improvement work could begin.
This was not a problem that could be solved by replacing the system with something off the shelf. It required working through a large, complex C++/OpenCL codebase, reconstructing a complete mathematical picture of the algorithms, and then developing a faster, better parallelized replacement while maintaining the micron-level accuracy required for medical-grade use. E4D worked with Northwest Mathematics to carry out the full R&D and refactor required.
How We Worked Together
The first task was making the existing system intelligible. This meant an extensive process of working through the existing codebase to understand what the algorithm was actually doing and why, and then communicating that understanding back to E4D’s team through presentations and clear documentation that connected the SLAM algorithm to the actual code. Restoring that understanding was itself a significant improvement in conditions before any new development began.
From there the work moved into R&D: Developing a new parallelized SLAM algorithm that met the high accuracy requirements while improving speed. Northwest Mathematics also developed a novel meshing algorithm to improve the accuracy of the final 3D model, an additional technical challenge that emerged during the first phase of work.
The final phase of the engagement included a sustained integration process: Working directly alongside E4D’s engineers over an extended period as they tested the algorithms, surfaced edge cases, and built working knowledge of the new implementation. Adjustments were made throughout in response to their findings.
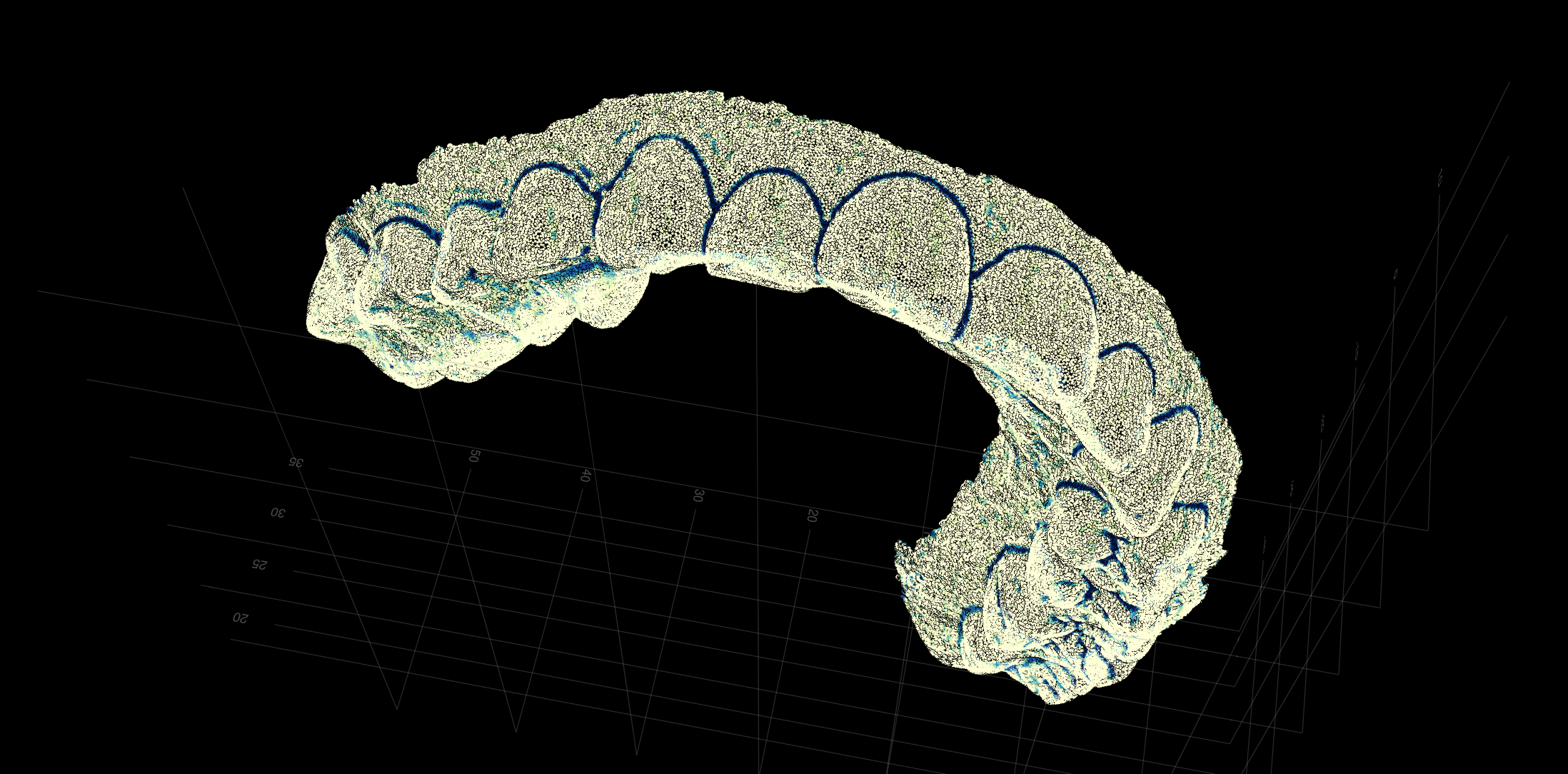
Curvature based analysis of dental scan point cloud.
The Outcome
E4D gained a clear, documented understanding of their core algorithm along with a faster parallelized SLAM implementation and a novel meshing algorithm. The speed improvements were achieved while maintaining medical-grade accuracy. Additionally, the improvements to the code base and the removal of a black box had second order effects, allowing old code to be removed and other modules to be correspondingly simplified.
Beyond the code, the engagement delivered a restoration of understanding of the core software powering the product: Through written reports and presentations tying the mathematical algorithms directly to the implementation, E4D’s team came away with a clearer picture of how their own system worked, one they could build on and extend independently.